| Si vous ne lisez pas correctement cet Email, veuillez cliquer ici .... |
|||||

|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
| Si vous ne souhaitez plus recevoir cette newsletter, veuillez cliquer ici .... | |||||
| Si vous ne lisez pas correctement cet Email, veuillez cliquer ici .... |
|||||
|
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
| Si vous ne souhaitez plus recevoir cette newsletter, veuillez cliquer ici .... | |||||
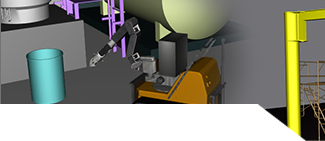
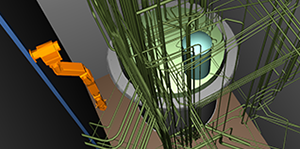
 DEMplus© calcule en temps réel les déplacements de toutes les liaisons pour réaliser le mouvement demandé.
DEMplus© calcule en temps réel les déplacements de toutes les liaisons pour réaliser le mouvement demandé.